No products in the cart.
Definitions
2.Definitions
2.1 Coordinate Frames
Three different coordinate frames are used to represent the location of a mobility based system:
Global Frame – Representing where in the world something is located.
World geodetic (WGS-84) latitude, longitude, and height (LLH) above the ellipsoid is used to represent global position. This frame should be used for any globally referenced waypoints or object locations. Accuracy estimates of the global position are provided in meters.
Local Frame – Representing where actively sensed items are relative to each other and the vehicle. It is isolated from dynamic sources of GPS error.
A floating, north-aligned local frame in north, east, down (NED) coordinates is used to represent local position. The local position is initialized on the startup of the vehicle and is intended to provide a stable frame for local navigation, for instance, to represent the location of objects in the vicinity of the vehicle.
Vehicle Frame – Representing vehicle velocities and orientation.
The vehicle specific parameters and the velocity state output are represented in vehicle frame. This frame is represented using forward, right, down (FRD) convention, with the associated rotations given as roll, pitch, yaw, respectively. The origin of this frame can be chosen arbitrarily but is typically placed at the center of the rear wheels for Ackerman vehicles or center of mass for skid-steer vehicles. The vehicle frame provides a point of reference for measuring the location of the sensor system components.
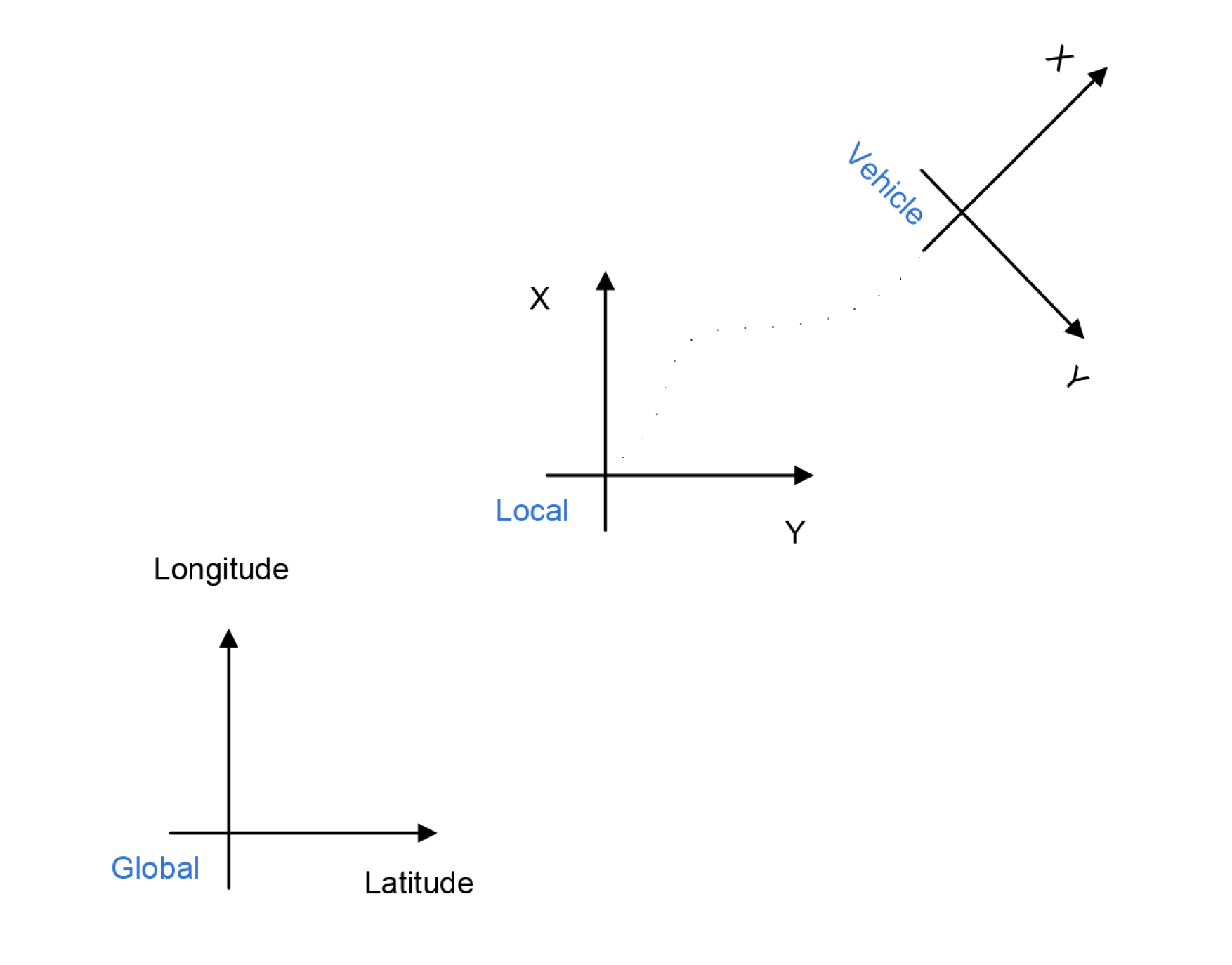
Figure 5 Relationship between coordinate frames and axis conventions