No products in the cart.
Global Pose Sensor
3.Global Pose Sensor
The Global Pose Sensor service reports the locations of the mobility system in the Global Coordinate frame.
Require: core:AccessControl
Inherit from: none
3.1 Service Behavior
3.1.1 State Diagram
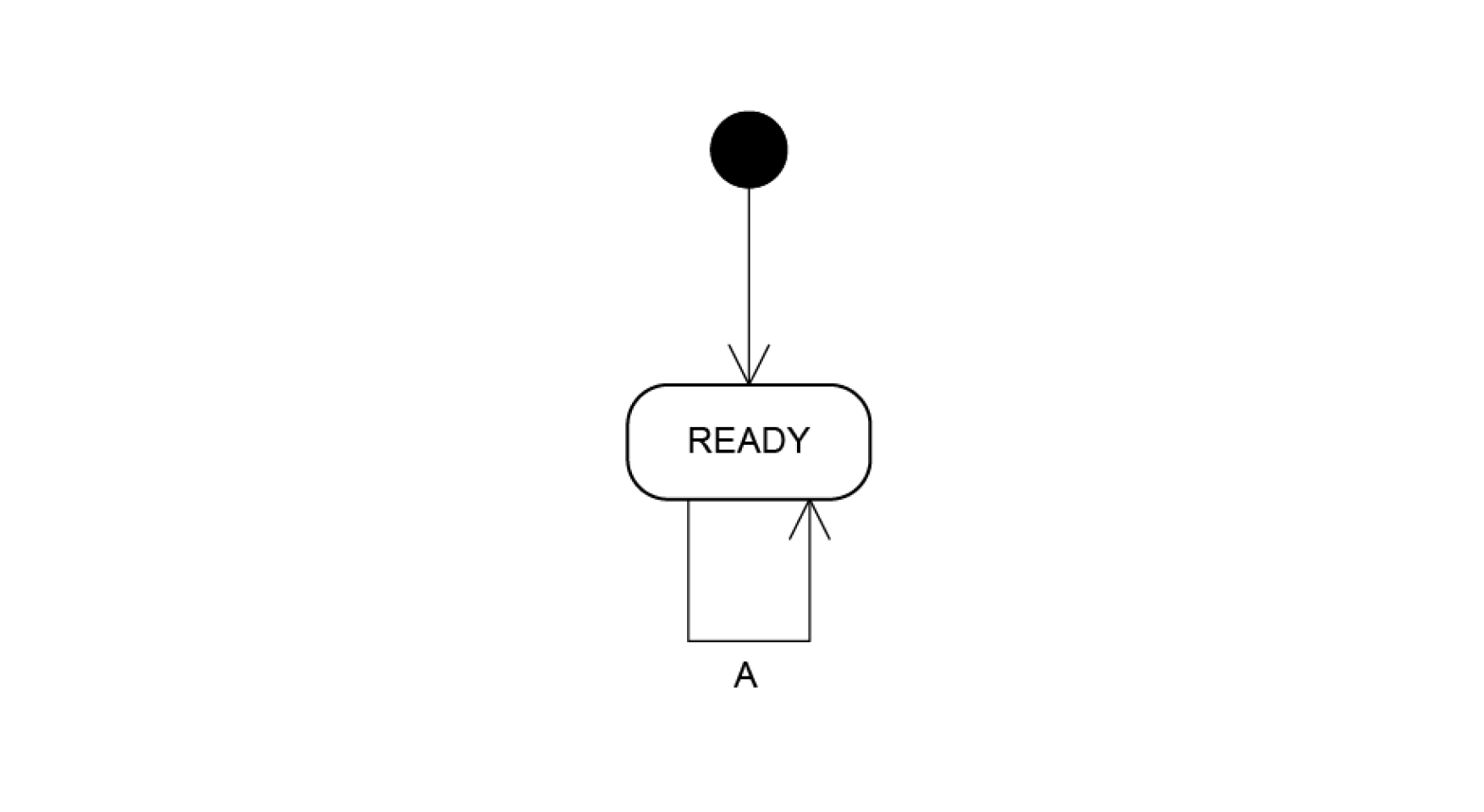
Figure 2 Global Pose Sensor State Diagram
3.1.2 State Actions
| State | Actions |
|---|---|
| READY |
|
3.1.3 Internal Events
| Event | Parameters | Purpose |
|---|---|---|
| ieReceiveMessage | Message received |
3.1.4 Transitions
| Transition | Trigger | Condition | Action |
|---|---|---|---|
| A | ieReceiveMessage | Process received messages |
3.2 Protocol
3.2.1 Incoming Message Set
| # | ID | Message |
|---|---|---|
| 1 | H:0x00000001 L:0x00000201 | Query Global Pose |
| 2 | H:0x00000001 L:0x00000202 | Set Global Pose |
3.2.2 Outgoing Message Set
| # | ID | Message |
|---|---|---|
| 1 |
H:0x00000001 L: 0x00000203 |
Report Global Pose |
3.3 Parameters
- CYCLEINTERVAL double, time interval in seconds of each cycle, default=0.1.
- DATATIMEOUT double, timeout in seconds for not receiving global pose updates, default=0.5.
3.4 Data
Set:
- location=globalpose, type=GlobalPoseRec