No products in the cart.
Stabilizer Driver
11.Stabilizer Driver
The Stabilizer Driver commands the stabilizers of the mobility system. The stabilizers can be controlled either by efforts or positions, depending on the stabilizer mode of the set drive configuration to the Drive Configuration service.
Require: core:AccessControl
Inherit from: core:Management
11.1 Service Behavior
11.1.1 State Diagram
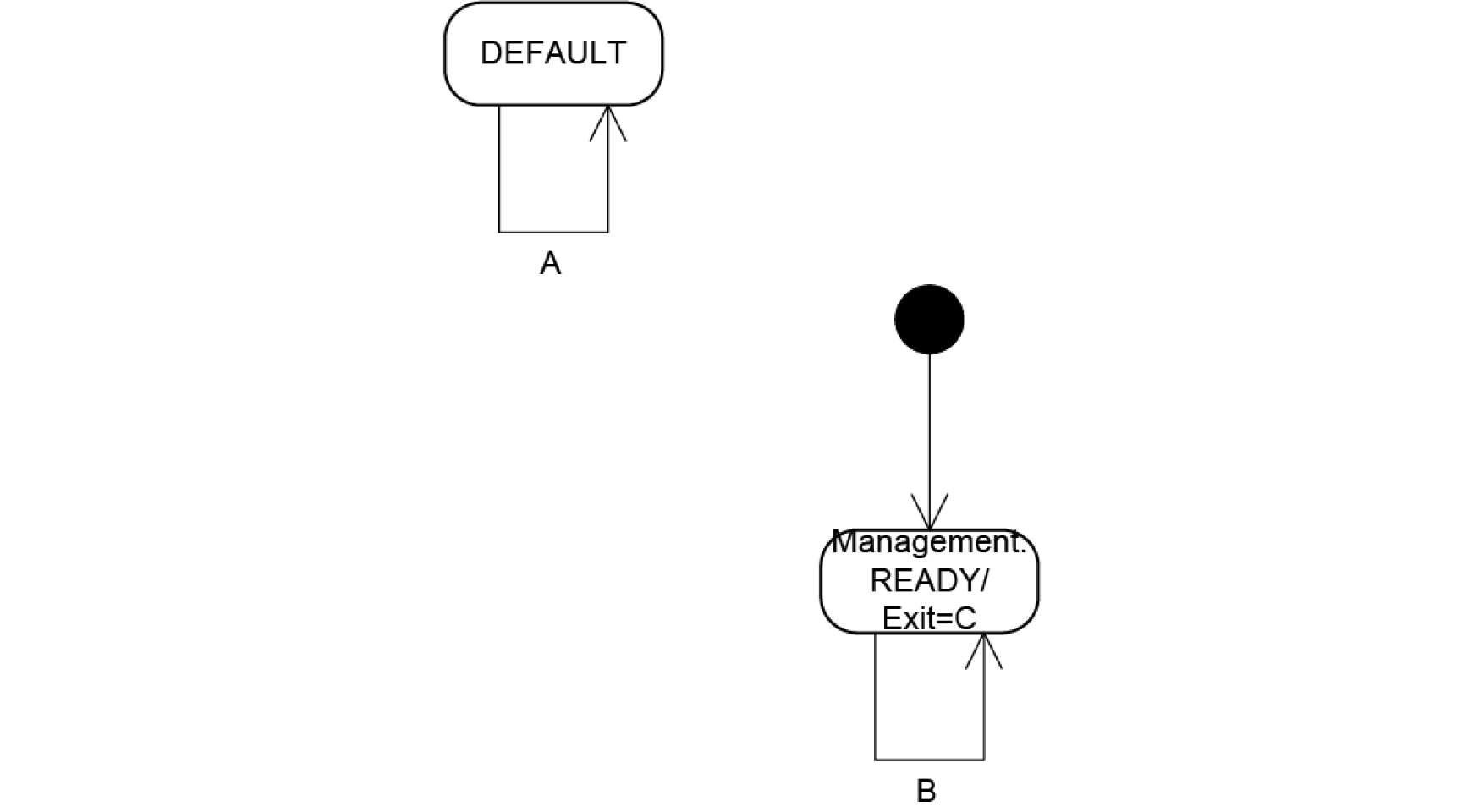
Figure 10 Stabilizer Driver State Diagram
11.1.2 State Actions
| State | Actions |
|---|---|
| core:Management.READY |
|
| DEFAULT |
|
11.1.3 Internal Events
| Event | Parameters | Purpose |
|---|---|---|
| ieReceiveMessage | Message received |
11.1.4 Transitions
| Transition | Trigger | Condition | Action |
|---|---|---|---|
| A |
Query Stabilizer Capabilities Query Stabilizer Efforts Query Stabilizer Positions |
Process message | |
| B |
Set Stabilizer Efforts Set Stabilizer Positions |
Process message | |
| C | Management exits READY state | Reset commanding efforts to safe efforts and stop position request. |
11.2 Protocol
11.2.1 Incoming Message Set
| # | ID | Message |
|---|---|---|
| 1 |
H:0x00000001 L: 0x00000217 |
Query Stabilizer Capabilities |
| 2 |
H:0x00000001 L: 0x00000219 |
Set Stabilizer Efforts |
| 3 |
H:0x00000001 L: 0x0000021A |
Query Stabilizer Efforts |
| 4 |
H:0x00000001 L: 0x0000021C |
Set Stabilizer Positions |
| 5 |
H:0x00000001 L: 0x0000021D |
Query Stabilizer Positions |
11.2.2 Outgoing Message Set
| # | ID | Message |
|---|---|---|
| 1 |
H:0x00000001 L: 0x00000218 |
Report Stabilizer Capabilities |
| 2 |
H:0x00000001 L: 0x0000021B |
Report Stabilizer Efforts |
| 3 |
H:0x00000001 L: 0x0000021E |
Report Stabilizer Positions |
11.3 Parameters
-
- CYCLEINTERVAL double, time interval in seconds of each cycle, default=0.1.
- DATATIMEOUT double, timeout in seconds for not receiving stabilizer efforts updates, default=0.5.
- CAPABILITIES list of StabilizerCapabilityRec
11.4 Data
Get:
- location=stabilizerefforts, type=StabilizerEffortRecList
- location=stabilizerpositions, type=StabilizerPositionRecList