No products in the cart.
Primitive Driver
7.Primitive Driver
The Primitive Driver commands movements of the mobility system using 6 degrees of freedom. This service is not designated to particular types of the system.
Require: core:AccessControl
Inherit from: core:Management
7.1 Service Behavior
7.1.1 State Diagram
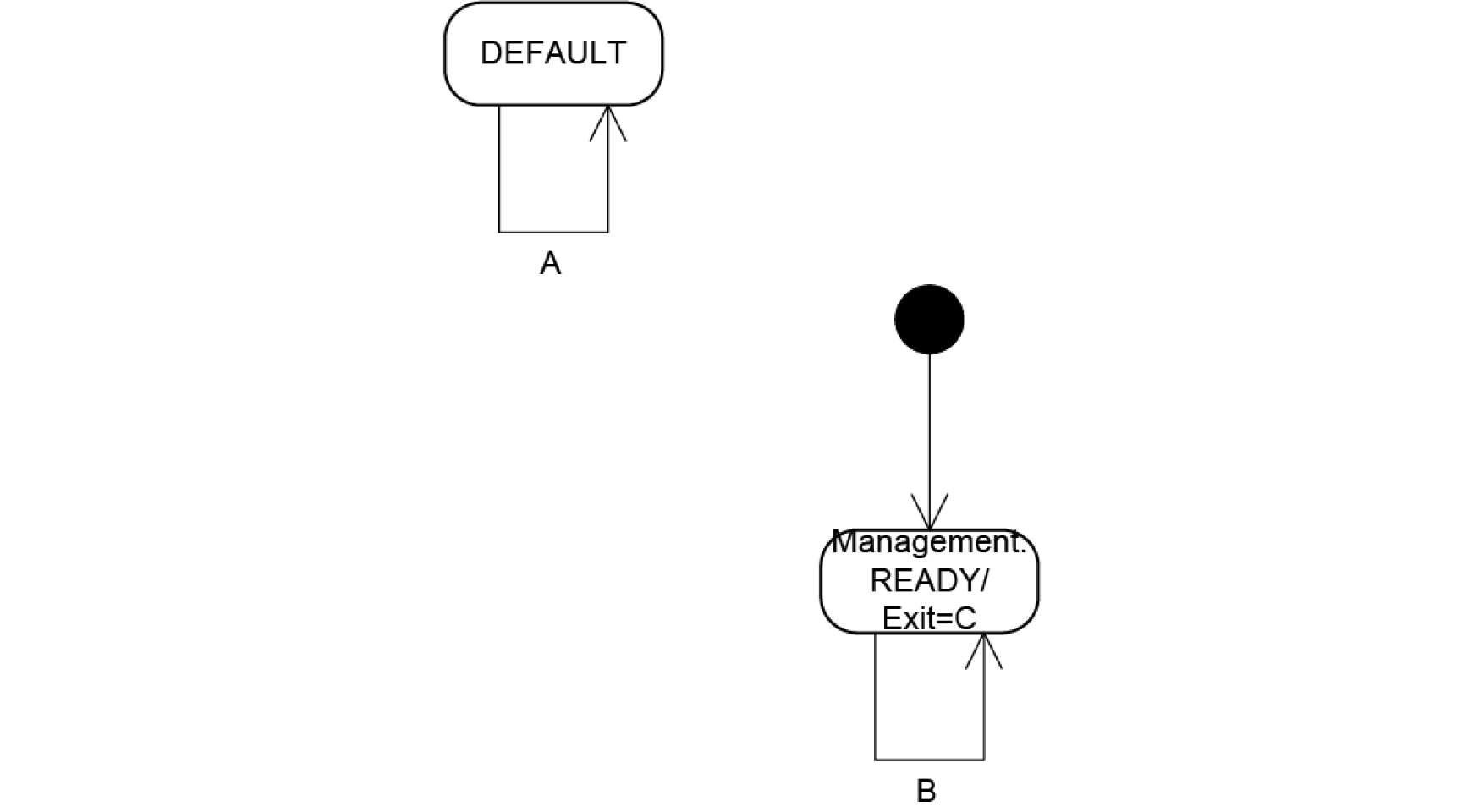
Figure 6 Primitive Driver State Diagram
7.1.2 State Actions
| State | Actions |
|---|---|
| core:Management.READY |
|
| DEFAULT |
|
7.1.3 Internal Events
| Event | Parameters | Purpose |
|---|---|---|
| ieReceiveMessage | Message received |
7.1.4 Transitions
| Transition | Trigger | Condition | Action |
|---|---|---|---|
| A | Query Wrench Efforts | Process message | |
| B | Set Wrench Efforts | Process message | |
| C | Management exits READY state | Reset commanding efforts to safe efforts |
7.2 Protocol
7.2.1 Incoming Message Set
| # | ID | Message |
|---|---|---|
| 1 |
H:0x00000001 L:0x0000020B |
Query Wrench Efforts |
| 2 |
H:0x00000001 L:0x0000020C |
Set Wrench Efforts |
7.2.2 Outgoing Message Set
| # | ID | Message |
|---|---|---|
| 1 |
H:0x00000001 L: 0x0000020D |
Report Wrench Efforts |
7.3 Parameters
-
- CYCLEINTERVAL double, time interval in seconds of each cycle, default=0.1.
- DATATIMEOUT double, timeout in seconds for not receiving wrench effort updates, default=0.5.
7.4 Data
Get:
- location=wrenchefforts, type=WrenchEffortsRec